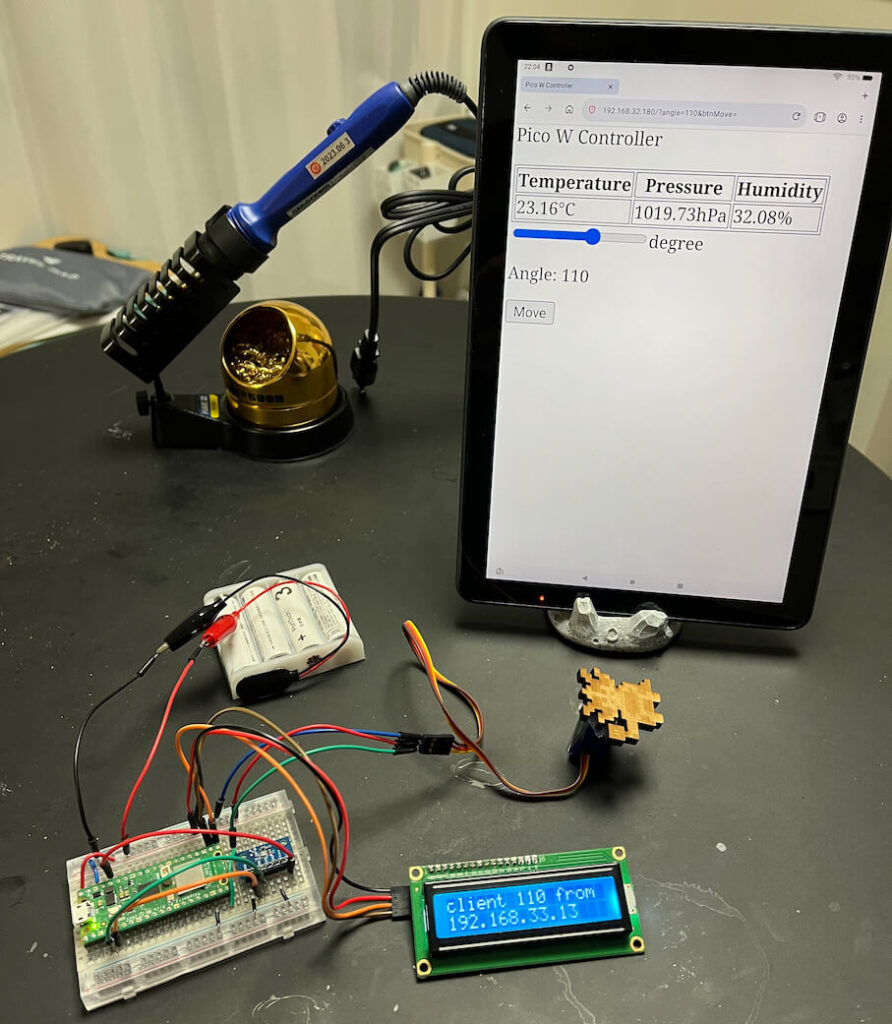
PicoWってTCPIP使えるので、僕にとってはメッチャ楽チンです。
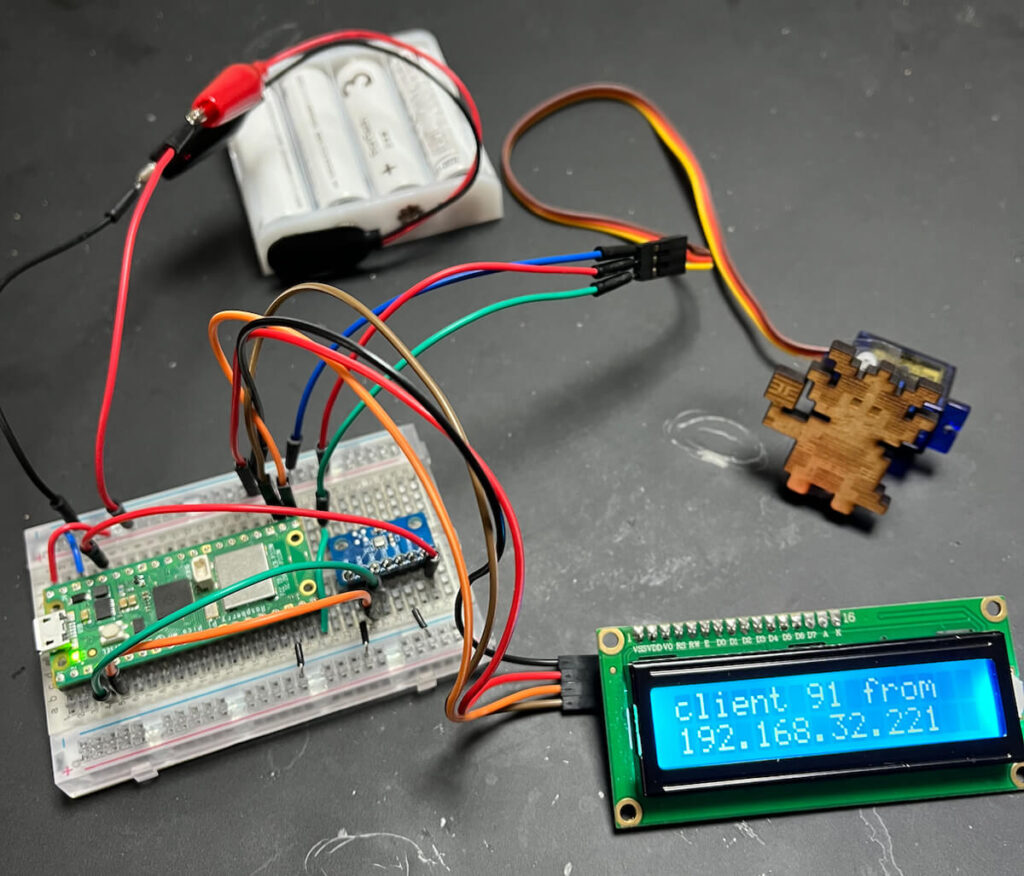
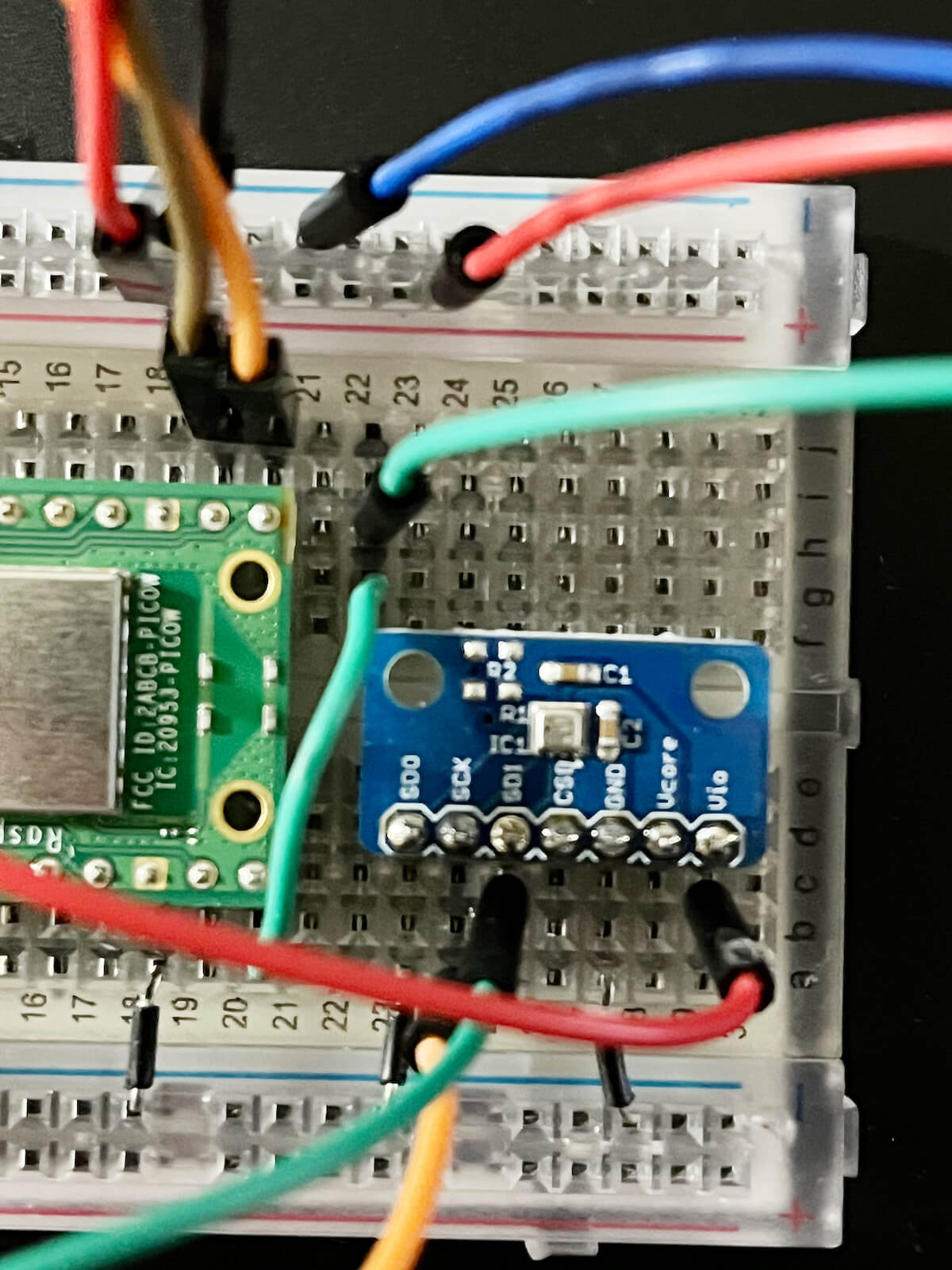
今回、Picoには、サーボモータと、温度・気圧・湿度センサーだけ取り付けました。
今まで、ハンダ使った事なかったので、断線が多くディバックで無駄なハマり多かったのですが、ハンダも覚えたので、PGに集中できました。
クラシックなWebページに、湿度・気圧・湿度を表示して、スライダーで角度を指定し、サーボを動かしました。
import time
import network
import socket
import re
from lcd1602 import LCD
from machine import Pin, PWM, I2C
from NetInfo import NetInfo
from bme280 import BME280
def servo_value(degree):
return int((degree * 9.5 / 180 + 2.5) * 65535 / 100)
try:
led = Pin('LED', Pin.OUT)
led.value(1)
time.sleep(1)
lcd = LCD()
lcd.clear()
lcd.message("read setting")
netInfo = NetInfo()
wifiText = netInfo.getWifiSetting()
netInfo.setWifiSetting(wifiText,netInfo)
led.value(0)
lcd.clear()
lcd.message("wifi connecting \n" + netInfo.Ssid + ':' + netInfo.Pass)
wlan = network.WLAN(network.STA_IF)
wlan.active(True)
wlan.connect(netInfo.Ssid, netInfo.Pass)
lcd.clear()
lcd.message("wifi connect \n" + netInfo.Ssid + ':' + netInfo.Pass)
bme = BME280()
while wlan.isconnected() == False:
pass
lcd.clear()
lcd.message("wifi connected!")
wlan.ifconfig((netInfo.Ip, netInfo.Mask, netInfo.Gw, '8.8.8.8'))
time.sleep(1)
wlan_status = wlan.ifconfig()
lcd.clear()
lcd.message(f'IP Address: \n{wlan_status[0]}')
pwmServo = PWM(Pin(15))
pwmServo.freq(50)
ang = 0
pwmServo.duty_u16(servo_value(ang))
addr = socket.getaddrinfo('0.0.0.0', 80)[0][-1]
s = socket.socket()
s.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1)
s.bind(addr)
s.listen(1)
lcd.clear()
lcd.message('listening on\n' + wlan_status[0])
led.value(1)
while True:
cl, addr = s.accept()
try:
lcd.clear()
lcd.message('client connected from \n' + str(addr[0]))
request = cl.recv(1024)
request = str(request)
print(request)
anglevalue = request.find('angle=')
if (anglevalue >= 0):
anglevalue = request.index('angle=')
anglevalue = anglevalue + len('angle=')
ang = int(re.sub(r"\D", "", request[anglevalue:anglevalue + 4]))
print('anglevalue:' + str(ang))
pwmServo.duty_u16(servo_value(ang))
lcd.clear()
lcd.message('client ' + str(ang) + ' from \n' + str(addr[0]))
print('@num' + str(ang))
threeValues = bme.values
print(threeValues)
temp = str(threeValues[0]) + '°C'
print('@Temperature' + threeValues[0])
press = str(threeValues[1]) + 'hPa'
print('@Pressure' + threeValues[1])
humi = str(threeValues[2]) + '%'
print('@Humidity' + threeValues[2])
response = netInfo.getHtml().replace('@num',str(ang))
print('getHtml() done')
response = response.replace('@Temperature',temp)
response = response.replace('@Pressure',press)
response = response.replace('@Humidity',humi)
full_response = 'HTTP/1.0 200 OK\r\nContent-type: text/html\r\n\r\n' + response
print(full_response)
cl.send(full_response)
cl.close()
except OSError as e:
cl.close()
lcd.clear()
lcd.message('OSError')
except:
cl.close()
lcd.clear()
lcd.message('Error')
pass
except KeyboardInterrupt:
pass
class NetInfo:
Ssid = ''
Pass = ''
Ip = ''
Mask = ''
Gw = ''
def set(self,Ssid,Pass,Ip,Mask,Gw):
self.Ssid = Ssid
self.Pass = Pass
self.Ip = Ip
self.Mask = Mask
self.Gw = Gw
def getWifiSetting(self):
path = '/wifi.txt'
try:
with open(path,'r') as rf:
strReadData = rf.read()
print("rf.read : " + strReadData)
return strReadData
except:
strWriteData = ''
with open(path,'w') as wf:
strWriteData = 'ssid:240258107387' + '\n'
strWriteData = strWriteData + 'pass:36113521' + '\n'
strWriteData = strWriteData + 'ip:192.168.32.140' + '\n'
strWriteData = strWriteData + 'mask:255.255.254.0' + '\n'
strWriteData = strWriteData + 'gw:192.168.32.1' + '\n'
try:
wf.write(strWriteData)
print("wf.write : " + strReadData)
except:
pass
return strWriteData
pass
def setWifiSetting(self,inText,netInfo):
try:
netInfo.Ssid = ''
netInfo.Pass = ''
netInfo.Ip = ''
netInfo.Mask = ''
netInfo.Gw = ''
for item in inText.split('\n'):
if (item.rfind('ssid:') != -1):
netInfo.Ssid = item[5:]
if (item.rfind('pass:') != -1):
netInfo.Pass = item[5:]
if (item.rfind('ip:') != -1):
netInfo.Ip = item[3:]
if (item.rfind('mask:') != -1):
netInfo.Mask = item[5:]
if (item.rfind('gw:') != -1):
netInfo.Gw = item[3:]
print("setWifiSetting : \n" + netInfo.Ssid)
return
except:
pass
def getHtml(self):
strHtml = 'HTML string'
return strHtml
import machine
import time
class LCD():
def __init__(self, addr=0x27, blen=1):
sda = machine.Pin(16)
scl = machine.Pin(17)
self.bus = machine.I2C(0,sda=sda, scl=scl, freq=400000)
print(self.bus)
print(str(self.bus.scan()))
print(str(hex(self.bus.scan()[0])))
self.addr = addr
self.blen = blen
self.send_command(0x33) # Must initialize to 8-line mode at first
time.sleep(0.005)
self.send_command(0x32) # Then initialize to 4-line mode
time.sleep(0.005)
self.send_command(0x28) # 2 Lines & 5*7 dots
time.sleep(0.005)
self.send_command(0x0C) # Enable display without cursor
time.sleep(0.005)
self.send_command(0x01) # Clear Screen
self.bus.writeto(self.addr, bytearray([0x08]))
def write_word(self, data):
temp = data
if self.blen == 1:
temp |= 0x08
else:
temp &= 0xF7
self.bus.writeto(self.addr, bytearray([temp]))
def send_command(self, cmd):
# Send bit7-4 firstly
buf = cmd & 0xF0
buf |= 0x04 # RS = 0, RW = 0, EN = 1
self.write_word(buf)
time.sleep(0.002)
buf &= 0xFB # Make EN = 0
self.write_word(buf)
# Send bit3-0 secondly
buf = (cmd & 0x0F) << 4
buf |= 0x04 # RS = 0, RW = 0, EN = 1
self.write_word(buf)
time.sleep(0.002)
buf &= 0xFB # Make EN = 0
self.write_word(buf)
def send_data(self, data):
# Send bit7-4 firstly
buf = data & 0xF0
buf |= 0x05 # RS = 1, RW = 0, EN = 1
self.write_word(buf)
time.sleep(0.002)
buf &= 0xFB # Make EN = 0
self.write_word(buf)
# Send bit3-0 secondly
buf = (data & 0x0F) << 4
buf |= 0x05 # RS = 1, RW = 0, EN = 1
self.write_word(buf)
time.sleep(0.002)
buf &= 0xFB # Make EN = 0
self.write_word(buf)
def clear(self):
self.send_command(0x01) # Clear Screen
def openlight(self): # Enable the backlight
self.bus.writeto(self.addr,bytearray([0x08]))
# self.bus.close()
def write(self, x, y, str):
if x < 0: x = 0 if x > 15:
x = 15
if y < 0: y = 0 if y > 1:
y = 1
# Move cursor
addr = 0x80 + 0x40 * y + x
self.send_command(addr)
for chr in str:
self.send_data(ord(chr))
def message(self, text):
#print("message: %s"%text)
for char in text:
if char == '\n':
self.send_command(0xC0) # next line
else:
self.send_data(ord(char))
import time
from ustruct import unpack, unpack_from
from array import array
import machine
# BME280 default address.
BME280_I2CADDR = 0x76
# Operating Modes
BME280_OSAMPLE_1 = 1
BME280_OSAMPLE_2 = 2
BME280_OSAMPLE_4 = 3
BME280_OSAMPLE_8 = 4
BME280_OSAMPLE_16 = 5
BME280_REGISTER_CONTROL_HUM = 0xF2
BME280_REGISTER_CONTROL = 0xF4
class BME280:
def __init__(self,
mode=BME280_OSAMPLE_1,
address=BME280_I2CADDR,
i2c=None,
**kwargs):
# Check that mode is valid.
if mode not in [BME280_OSAMPLE_1, BME280_OSAMPLE_2, BME280_OSAMPLE_4,
BME280_OSAMPLE_8, BME280_OSAMPLE_16]:
raise ValueError(
'Unexpected mode value {0}. Set mode to one of '
'BME280_ULTRALOWPOWER, BME280_STANDARD, BME280_HIGHRES, or '
'BME280_ULTRAHIGHRES'.format(mode))
self._mode = mode
self.address = address
if i2c is None:
i2c = machine.I2C(1,scl=machine.Pin(3, machine.Pin.IN), sda=machine.Pin(2, machine.Pin.IN), freq=400000)
print(i2c)
print(str(hex(i2c.scan()[0])))
#raise ValueError('An I2C object is required.')
self.i2c = i2c
# load calibration data
dig_88_a1 = self.i2c.readfrom_mem(self.address, 0x88, 26)
dig_e1_e7 = self.i2c.readfrom_mem(self.address, 0xE1, 7)
self.dig_T1, self.dig_T2, self.dig_T3, self.dig_P1, \
self.dig_P2, self.dig_P3, self.dig_P4, self.dig_P5, \
self.dig_P6, self.dig_P7, self.dig_P8, self.dig_P9, \
_, self.dig_H1 = unpack("<HhhHhhhhhhhhBB", dig_88_a1)
self.dig_H2, self.dig_H3 = unpack("<hB", dig_e1_e7)
e4_sign = unpack_from("<b", dig_e1_e7, 3)[0]
self.dig_H4 = (e4_sign << 4) | (dig_e1_e7[4] & 0xF)
e6_sign = unpack_from("<b", dig_e1_e7, 5)[0]
self.dig_H5 = (e6_sign << 4) | (dig_e1_e7[4] >> 4)
self.dig_H6 = unpack_from("<b", dig_e1_e7, 6)[0]
self.i2c.writeto_mem(self.address, BME280_REGISTER_CONTROL,
bytearray([0x3F]))
self.t_fine = 0
# temporary data holders which stay allocated
self._l1_barray = bytearray(1)
self._l8_barray = bytearray(8)
self._l3_resultarray = array("i", [0, 0, 0])
def read_raw_data(self, result):
""" Reads the raw (uncompensated) data from the sensor.
Args:
result: array of length 3 or alike where the result will be
stored, in temperature, pressure, humidity order
Returns:
None
"""
self._l1_barray[0] = self._mode
self.i2c.writeto_mem(self.address, BME280_REGISTER_CONTROL_HUM,
self._l1_barray)
self._l1_barray[0] = self._mode << 5 | self._mode << 2 | 1
self.i2c.writeto_mem(self.address, BME280_REGISTER_CONTROL,
self._l1_barray)
sleep_time = 1250 + 2300 * (1 << self._mode)
sleep_time = sleep_time + 2300 * (1 << self._mode) + 575
sleep_time = sleep_time + 2300 * (1 << self._mode) + 575
time.sleep_us(sleep_time) # Wait the required time
# burst readout from 0xF7 to 0xFE, recommended by datasheet
self.i2c.readfrom_mem_into(self.address, 0xF7, self._l8_barray)
readout = self._l8_barray
# pressure(0xF7): ((msb << 16) | (lsb << 8) | xlsb) >> 4
raw_press = ((readout[0] << 16) | (readout[1] << 8) | readout[2]) >> 4
# temperature(0xFA): ((msb << 16) | (lsb << 8) | xlsb) >> 4
raw_temp = ((readout[3] << 16) | (readout[4] << 8) | readout[5]) >> 4
# humidity(0xFD): (msb << 8) | lsb
raw_hum = (readout[6] << 8) | readout[7] result[0] = raw_temp result[1] = raw_press result[2] = raw_hum def read_compensated_data(self, result=None): """ Reads the data from the sensor and returns the compensated data. Args: result: array of length 3 or alike where the result will be stored, in temperature, pressure, humidity order. You may use this to read out the sensor without allocating heap memory Returns: array with temperature, pressure, humidity. Will be the one from the result parameter if not None """ self.read_raw_data(self._l3_resultarray) raw_temp, raw_press, raw_hum = self._l3_resultarray # temperature var1 = ((raw_temp >> 3) - (self.dig_T1 << 1)) * (self.dig_T2 >> 11)
var2 = (((((raw_temp >> 4) - self.dig_T1) *
((raw_temp >> 4) - self.dig_T1)) >> 12) * self.dig_T3) >> 14
self.t_fine = var1 + var2
temp = (self.t_fine * 5 + 128) >> 8
# pressure
var1 = self.t_fine - 128000
var2 = var1 * var1 * self.dig_P6
var2 = var2 + ((var1 * self.dig_P5) << 17)
var2 = var2 + (self.dig_P4 << 35) var1 = (((var1 * var1 * self.dig_P3) >> 8) +
((var1 * self.dig_P2) << 12))
var1 = (((1 << 47) + var1) * self.dig_P1) >> 33
if var1 == 0:
pressure = 0
else:
p = 1048576 - raw_press
p = (((p << 31) - var2) * 3125) // var1 var1 = (self.dig_P9 * (p >> 13) * (p >> 13)) >> 25
var2 = (self.dig_P8 * p) >> 19
pressure = ((p + var1 + var2) >> 8) + (self.dig_P7 << 4)
# humidity
h = self.t_fine - 76800
h = (((((raw_hum << 14) - (self.dig_H4 << 20) - (self.dig_H5 * h)) + 16384) >> 15) * (((((((h * self.dig_H6) >> 10) *
(((h * self.dig_H3) >> 11) + 32768)) >> 10) +
2097152) * self.dig_H2 + 8192) >> 14))
h = h - (((((h >> 15) * (h >> 15)) >> 7) * self.dig_H1) >> 4)
h = 0 if h < 0 else h h = 419430400 if h > 419430400 else h
humidity = h >> 12
if result:
result[0] = temp
result[1] = pressure
result[2] = humidity
return result
return array("i", (temp, pressure, humidity))
@property
def values(self):
""" human readable values """
t, p, h = self.read_compensated_data()
p = p // 256
pi = p // 100
pd = p - pi * 100
hi = h // 1024
hd = h * 100 // 1024 - hi * 100
return ("{}".format(t / 100), "{}.{:02d}".format(pi, pd),
"{}.{:02d}".format(hi, hd))